标注
dither
图像增强处理
产品运营
web大学生网页作业成品
kudu读写流程
进程替换
系统架构
宠物
symbol
技术
队列
百元百鸡
PyQt5
Silicon Labs
混合效应模型
洛谷
雪花算法
Java判断
StarRocks
扫地机器人
2024/4/11 21:48:47
是否有 API 可供云对接?
涂鸦提供了两种维度供开发者拉取:应用维度、产品维度。 应用维度:设备绑定的用户属于开发者在涂鸦云应用中的用户,开发者间接拥有权限操作属于自己应用用户的设备; 产品维度:设备所属产品属于开发者在涂鸦云产品中的设…
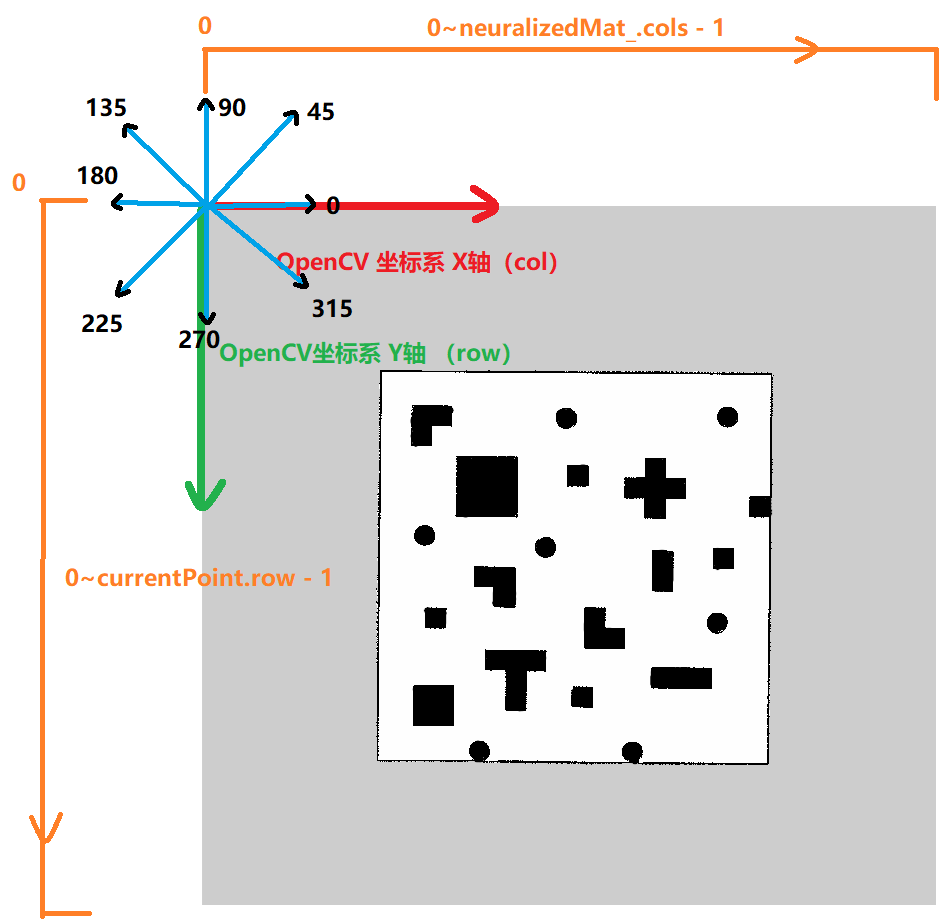
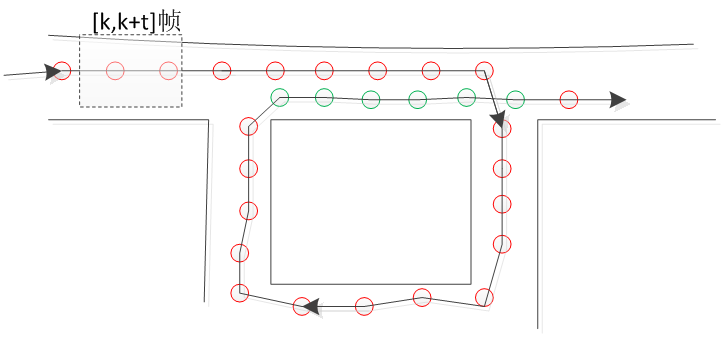
全覆盖路径规划开源项目Clean-robot-turtlebot3关键函数解析(下)
本系列文章主要介绍全覆盖路径规划开源项目Clean-robot-turtlebot3的相关内容,包含如下四篇文章,分别介绍了开源项目Clean-robot-turtlebot3流程的概括总结、ROS坐标系常用坐标及其变换、Clean-robot-turtlebot3关键函数解析等内容。 1、全覆盖路径规划开…
谁才是路径规划大师?五款扫地机器人实力PK
扫地机器人市场这几年发展很快,除了越来越多新品牌的加入,规划式扫地机器人渐成主流,扫拖一体设计也比较普遍,实体遥控器消失,智能操控明显升级,使用体验有了比较明显的进步,但从最终的产品价格…